
Breast Tomosynthesis density classification using Local Binary Patterns (2017)

Advisor - Dr. Robert Martí | Medical Image Analysis - Final Project
Team Members : Daniel Gonzalez Adell, Shubham Wagh and Ziyang HongWe proposed and implemented a novel method for the classification of the breast density out of the Digital Breast Tomosynthesis (DBT) into the BI-RADS scale. This approach makes use of Local Binary Patterns (LBP) as a base descriptor and K - Nearest Neighbours (KNN) as a classifier. Also, pre-processing of the DBT, such as skin-line removal, is performed. This method has so far provided a clssification accuracy of 93.75 % with a generally fast computation time.
[Presentation] | [Report]Autonomous Frontier Exploration, Mapping and Path-Planning using Octomap (2017)
Advisor - Dr. Marc Carreras Perez | Autonomous Robotics - Final Project
Team Members : Shubham Wagh, Anirudh Puligandla, Hassan Saeed and Dousai Nayee Muddin Khan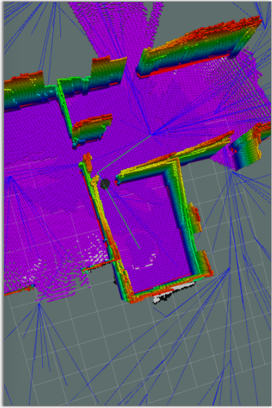
The project dealt with implementation of a high-level controller for Turtlebot in a simulated environment wherein the map is unknown. We proposed an autonomous exploration strategy for the robot to explore an unknown map as much as possible. This task is accomplished in two stages. Firstly, the robot explores the unknown environment by simultaneously building an octomap of the environment for a certain time.
Once a certain time has elapsed, the robot returns to the starting position using this obtained map. These
tasks exhibited more intelligence and robust behaviour.
[Presentation] | [Report] | [Video]Pascal Project Challenge (2017)
Advisor : Dr. Xavier Llado and Dr. Arnau Oliver | Scene Segmentation & Interpretation - Final Project
Team Members : Shubham Wagh and Dousai Nayee Muddin Khan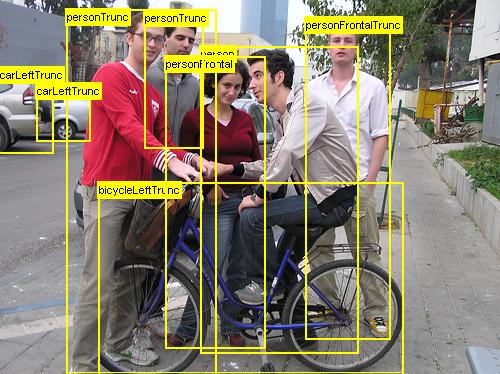
This project involved recognizing objects from a number of different visual classes using the template followed in the Pascal Challenge 2006. Ten object classes were classified with an average Area under the ROC curve value of 0.939 using AlexNet and 0.835 using Histogram of Gradient (HOG) features with spatial ordering respectively. HOG and Scale Invariant Feature Transform (SIFT)

methods were used to extract features from the images and they were improved by addition of color, texture and/or spatial information. Also features were extracted from pre-trained AlexNet CNN model. A bag of words strategy was used to build feature vectors. A detailed analysis of different classifying techniques used was also presented, with kernel SVM producing the best results.
[Report]3D Human Body Scanner (2016)
Advisor : Dr. Yohan Fougerolle | Software Engineering - Final Project
Team Members : Shubham Wagh (Team Leader), Gopikrishna Erabati, Yu Liu, Abdelrahman Gaber,
Anirudh Puligandla, Darja Stoeva, Chunxia Li, Ziyang Hong, Avinash Narayana, Hassan ZaalThe main objective of this project was to develop a 3D human body scanner software able to fully interface with a scanner rig composed of a turning table and a stationary depth sensor. The software developed is aimed to perform full body scan under 90 seconds. A friendly, interactive graphical user interface provides simple control and outputs watertight mesh results that can be used mainly but not limited to 3D printing.
[Presentation] | [Report]Face Recognition using Principal Component Analysis (2016)
Advisor : Dr. Désiré Sidibé | Applied Mathematics - Final Project
Team Members : Pamir Ghimire and Shubham Wagh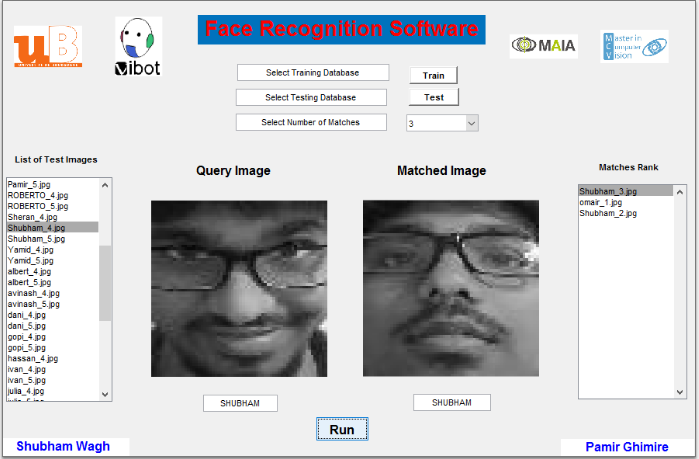
The aim of this project was build a face recognition system based on eigenfaces using a small face dataset. The project is divided in two main parts. 1) Normalization of faces. 2) PCA (Principal Component Analysis) based face recognition system. A friendly, interactive graphical user interface provides simple control and outputs matched image for a given test image.
[Report]Performance Evaluation : Anti-windup Two-Loop PID Controller for Rotary Single Inverted Pendulum (2016)
Advisor : Dr. Anjali Junghare | B.Tech Thesis
Team Members : Shubham Wagh, Rohit Salem, Kishore Seshadri, Sudheer Kumar, Pavan Srikanth,
Vishnu Kandukuri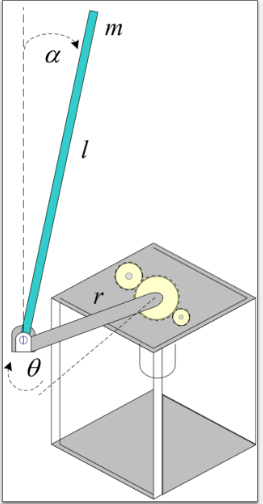
In this project, two loop Anti-windup PID controller is designed for Set-point tracking of Rotating arm and balancing the vertical position of Pendulum for Rotary Single Inverted Pendulum. Controller gains are obtained via pole placement and tuned by using the LQR technique. Comparative analysis of observer based pole placement controller, LQR and two-loop Anti-windup PID controller are experimentally performed. Steady-state error persists during the operation of two loop PD controller. In order to reduce this steady state error, integral term is added in controller. Due to violation of voltage constraints, an undesirable phenomena known as integral windup occurs. To overcome integral windup, Anti-windup technique (conditional integration) is used with two loop PID controller. Experimental result shows that proposed two loop Anti-windup PID controller gives better set-point
tracking and a minimum steady-state error as compared to other controllers.
[Presentation] | [Report] | [Video]The project was presented in IEEE RAS Summer School on Multi-Robot Systems, 2016 held at National University of Singapore, Singapore.
[Poster]Detection of fault in Railway Track using Optical Fiber (2015)
Advisor : Dr. B.S. Umre | TI Innovation Challenge India Design Contest 2015
Team Members : Rahul Choudhary, Shubham Wagh, Rohit Salem, Aditya Vidolkar, Ashish Ghatge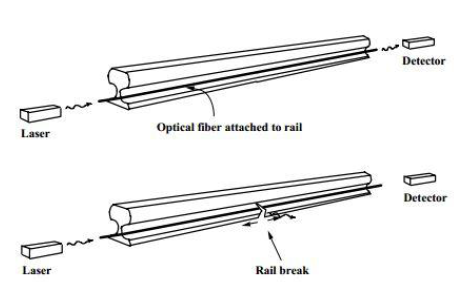
We proposed an engineering solution using fiber optic cable to supplement track circuits for detection of broken rails. According to this method, light is fed from an optical source into an optical fiber cable arranged along a railway track and comprising one or more optical fibers, each fiber having a uniform structure along the railway track; a light detector for receiving light pulses and for converting the light pulses into electrical signals. If fault is detected this will alert
the control station as well as send a message to the train driver via GSM to warn him of the
danger ahead.
[Report] | [Video]For this project idea, we won a semi-finalist award of 200 USD and were in top 86 teams out of 1,209 teams in India. This project also featured in Times of India of Nagpur edition and got an opportunity to implement the idea with National Entrepreneurship Network (NEN).
Two Wheel Self Balancing Robot (2014)
Advisor : Dr. M.A. Chaudhari | Mini - Project
Team Members : Shubham Wagh and Rahul Choudhary
The aim of the project was to make a robot balance autonomously on two wheels using Proportional, Integral and Derivative (PID) controller algorithm to keep track of the orientation
of the robot so as to minimize the error caused due to external factors.
[Report] | [Video]
Note: All Project codes are available on request.